안녕하세요.
역대급 테크닉 괴물 42100 Liebherr R 9800 Excavator 조립을 끝내고 그 여운에서 아직도 헤어나오지 못하고있습니다.
원래 8월1일 출시였지만, 10월1일로 연기되어 애간장을 태우더니, 9월27일 선출시되고나서 앱이 업데이트되지 않아서 또 애간장을 태우고 9월30일자로 앱이 업데이트되어 드디어 제대로 즐길수 있었습니다.
기본정보
42100 Liebherr R 9800 Excavator
2019년 10월 출시
4108피스 가격 60만원
2개의 스마트허브와 3개의 XL모터, 4개의 L모터 사용 풀구동 굴착기
블루투스연결 앱을통한 스마트폰 콘트롤
조종 인터페이스에 의한 수동조작, 터치와 드래그 조작, 프로그램 으로 일련의 동작을 구성, 일련의 동작을 녹화 등 여러가지 조작방법 지원
그야말로, 스마트허브가 뭔지 제대로 보여주는 제품입니다. (저는 작품이라고 말하고 싶습니다.)
비싸다 비싸다 하지만, 파워펑션 가격을 생각하면 그렇게 비싼것도 아닙니다.
공홈기준 무브허브 119900원, 블루투스 허브(기차와 배트모빌에 들어간) 74900 원 으로 볼때, 스마트허브는 그 중간인 10만원 정도로 보면, 스마트 허브 2개 가격만 20만원입니다.
앱컨트롤 배트모빌 등에 들어간 m모터의 경우 공홈가 24900원이니, 42100에 적용된 L모터와 XL모터는 그보다 더 비쌀것이고 24900원으로 계산하더라도 모터 7개 가격은 174300원이 됩니다.
약 40만원 정도의 파워펑션이 포함된 것이니, 본체는 20만원 정도 밖에 안되는거죠.
(물론 파워펑션의 공홈가가 창렬인건 인정합니다.)
한방에 큰 돈이 들어가긴 하지만, 생각해보면 비싼 가격은 절대 아니란겁니다.
테크닉 1세트 60만원 = 창렬
하지만 4108피스 20만원 = 혜자
아니겠습니까.
그러니 테크닉을 좋아하고 구동을 좋아하는 분이시라면, 정가던 뭐던 그냥 사시라고 추천하고 싶습니다.
세트에 대한 잡설은 여기까지 하고...
조립과정에, 완성사진에 앱 리뷰까지 하기엔 너무 방대해서 조작관련 부분에서는 중요한 부분만 소개하도록 하겠습니다.
어차피 구입하신 분들은 앱을 다뤄보실테고, 앱이 그렇게 어렵지 않으니 문제없을겁니다.
구입예정이시거나 구입하실 생각이 없으신 분들께 특징이 될만한 부분만 소개하는 방식으로 하도록 하겠습니다.
1번과정 시작입니다.
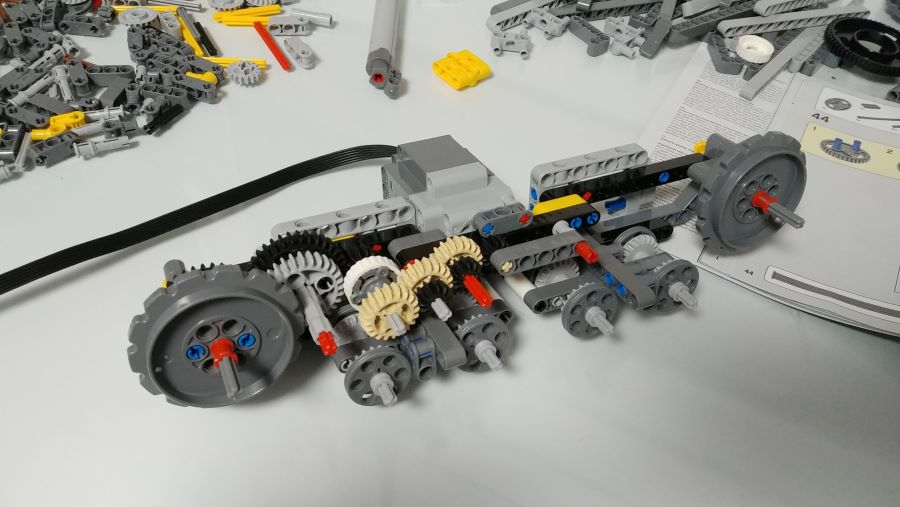
1번과정은 본체의 하부인 구동부와 본체를 회전시키기 위한 회전부 까지 입니다.
사진은 한쪽 구동부입니다.
양쪽 각각 XL모터로 구동하며, 여러차례 감속하여 속도는 느리지만 토크는 좋습니다.
중간쯤에 클러치가 들어가서 강한 부하가 걸리면 헛돌기 때문에 모터에 무리가 가지 않는 구조입니다.
완성후 테스트 해 보았을때, 캐터필러를 손으로 강하게 잡아야 클러치가 헛돌 정도로 클러치 파워가 좋습니다.
42095에 처음 사용되었던 엑스트라 라지 스프라켓과 2중 캐터필러 가이드롤러가 무거운 하중에도 불구하고 부드러운 구동을 가능하게 해 줍니다.
캐터필러 가이드롤러는 그냥 풀리만 사용한게 아니고, 베벨기어를 덧대어서 무게때문에 풀리가 비틀어지는것까지 잡아줍니다.
정말 감탄이 나오는 구조입니다.
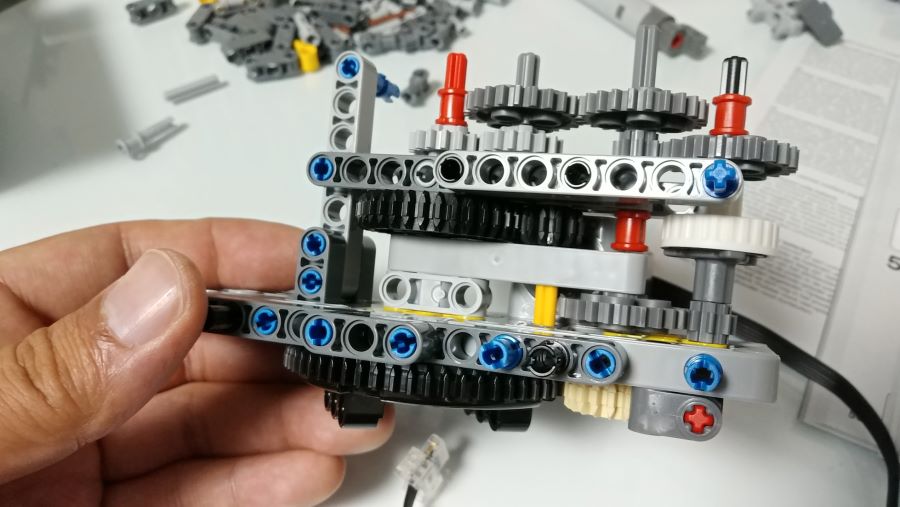
본체 회전부 입니다.
L모터로 구동되며 역시 클러치가 들어갑니다.
클러치가 있으므로, 본체는 그냥 손으로 강제로 돌려도 기어가 깨지거나 하는 문제는 없습니다.
클러치가 들어가면 여러모로 좋습니다.

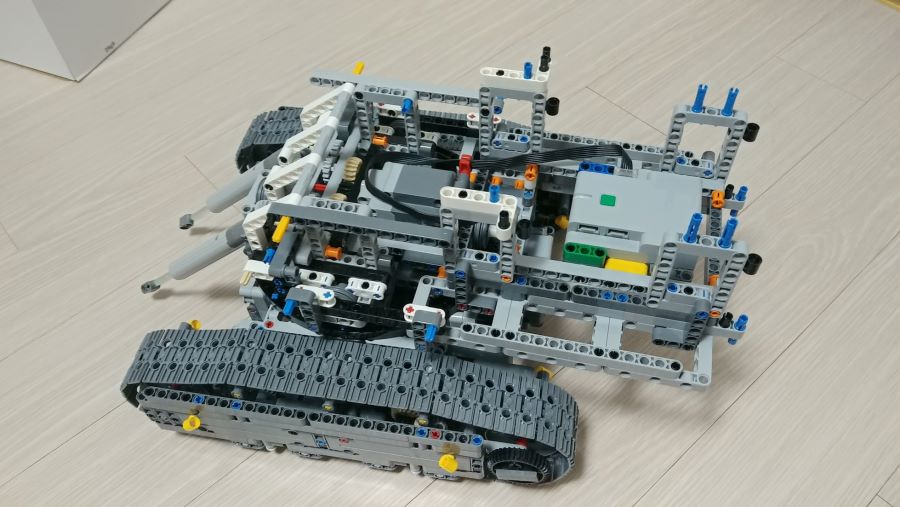
1번과정 완성입니다. 구동부를 보여드리기 위해 캐터필러는 장착하지 않고 촬영했습니다.
구동부에 2중 캐터필러 가이드 롤러와 본체회전을 위한 턴테이블, 외곽의 가이드레일이 보입니다.
여기까지 완성하면, 테스트 구동을 할수 있습니다.
앱을 첫 실행하면 위와같은 화면이 나옵니다.

각 단계별로 필요한 부분만 구동테스트가 가능합니다.
직접 조작하는 방식은 아니고, 저절로 구동된 후 제대로 구동되었는지 확인하는 방식입니다.
각 단계별로 필요로하는 모든 모터가 제대로 연결되어 있어야만 페어링 됩니다.
테크닉 제품은 조립실수가 있을수 있으므로, 아무리 조립에 자신있다 하더라도 중간 구동테스트는 필수입니다.
단계마다 필요한 테스트를 하시기 바랍니다.

2번과정 시작입니다.
붐을 들어올리는 역할을 하는 XL모터입니다.
한번의 감속을 거쳐 엑츄에이터를 작동하는 구조입니다.
정확한 데이터를 제시하지 못했지만, 이번 모터들이 예전 파워펑션의 모터들보다 토크 혹은 스피드가 더 높기때문에, 상대적으로 예전 모델들보다 더 빠르게 엑츄에이터를 작동시킵니다.

무거운 본체가 레일을 따라 부드럽게 회전하도록 풀리를 이용한 롤러가 장착됩니다.
총 4군데 장착되며 이 롤러덕에 하중이 골고루 분산되어 본체가 부드럽게 회전합니다.
스마트허브를 포함한 본체의 구동부는 다 만들어 졌습니다.
뒤쪽으로 쭉 뻣는데도 버티는 구조가 신기합니다.
아직은 암이 장착되지 않아서 하중이 뒤로 살짝 쏠립니다.
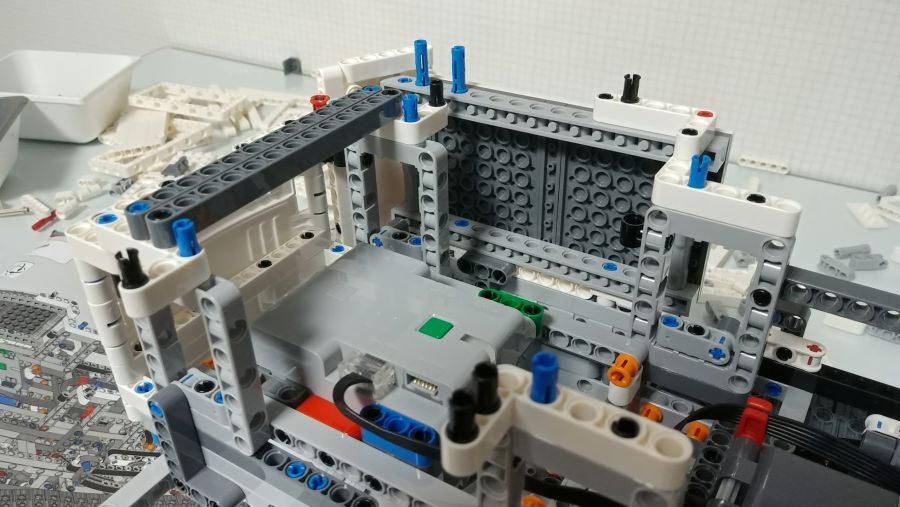
양옆은 이런식으로 시스템부품으로 막네요.
본체 속은 거의 텅텅 비다시피 합니다.
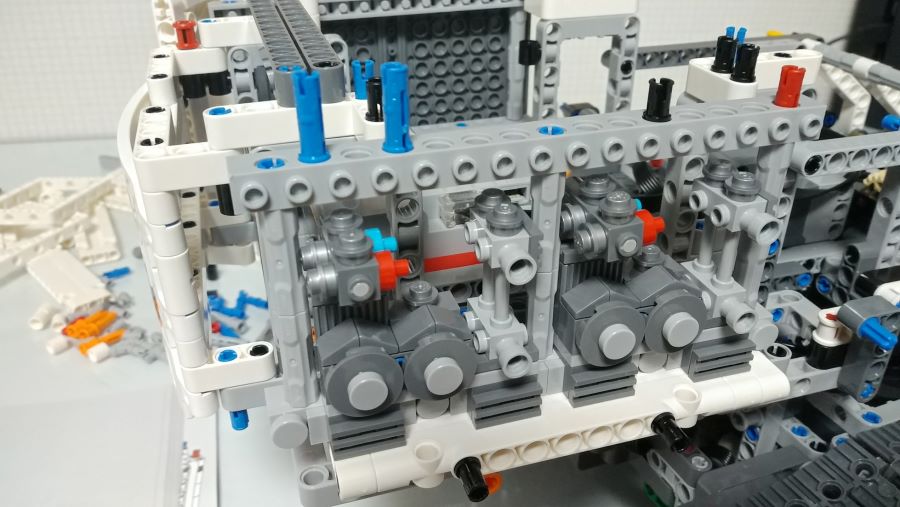
엔진부 입니다.
엔진이 작동하진 않지만, 깨알같은디테일이 참 멋집니다.

2번과정 완성입니다.
2번과정이 전체 단계 통틀어 가장 긴것 같습니다.
이때부터 거대함이 느껴지기 시작합니다.
2번과정을 끝낸 후 빌드테스트를 진행해 줍니다.
본체가 회전하는 부분만 체크하게 됩니다.
보시다시피 속은 텅텅...
3번과정 진행합니다.
3번과정은 주로 암을 조립합니다.
그런데.... 붐대에 L모터 3개가 모두 장착됩니다....
각각 암, 버킷, 버킷오픈을 담당합니다.

붐과 암 입니다.
이상태에서 무게가 상당합니다.

작동부는 붐에 대부분 몰려있고, 버킷 오픈을 위한 엑슬만 암을 통과합니다.
이때까지만 해도 버킷을 작동하기 위한 엑츄에이터가 암에 달릴줄 알았습니다.

그런데 완성하고 보니 버킷을 움직이는 엑츄에이터가 암이 아닌 붐에 고정됩니다.
이런구조면, 암과 버킷을 움직이는 엑츄에이터가 평행이 되면서, 암을 어떻게 움직이더라도, 버킷의 기울임은 영향을 받지 않는 구조가 됩니다.
보통의 굴착기는 버킷이 암에 고정된 느낌으로 암의 움직임을 따라가는데, 42100은 암의 움직임과 상관없이 버킷의 각도는 항상 유지가 되는것입니다.
이것은 42100의 구조라기 보다는 원래의 Liebherr R 9800 의 구조겠죠.
여기까지 3번과정이었습니다.
역시 빌드테스트를 진행해 줍니다.

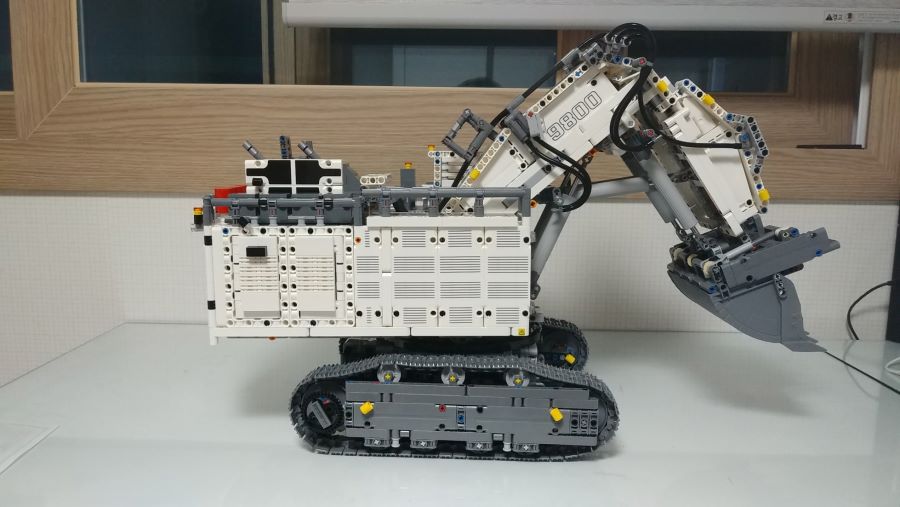
4번과정까지 완성입니다.
본체 상부의 디테일을 만들게 됩니다.
특이하게 4번과정은 대부분의 부품이 시스템 브릭입니다.
가격도 역대급, 부품수도 역대급, 무게도 역대급인데, 테크닉 사상 시스템 브릭 수도 역대급이 아닐까 싶습니다.
(물론 테크닉과 시스템의 경계가 모호했던 옛날제품에 비할바는 아니죠)

5번과정 진행입니다.
앙증맞은 운전석입니다.
비어스로 변신 대기중인 캡틴마블이 찬조출연 하였습니다.
딱 미피스케일이네요.

각종 난간 들과 실리콘호스 등 외장 디테일을 끝으로 5번과정까지 완료하였습니다.
다 만든것 같지만, 난간조립만 한시간이네요.
여기까지 총 12시간 정도 걸린것 같습니다.
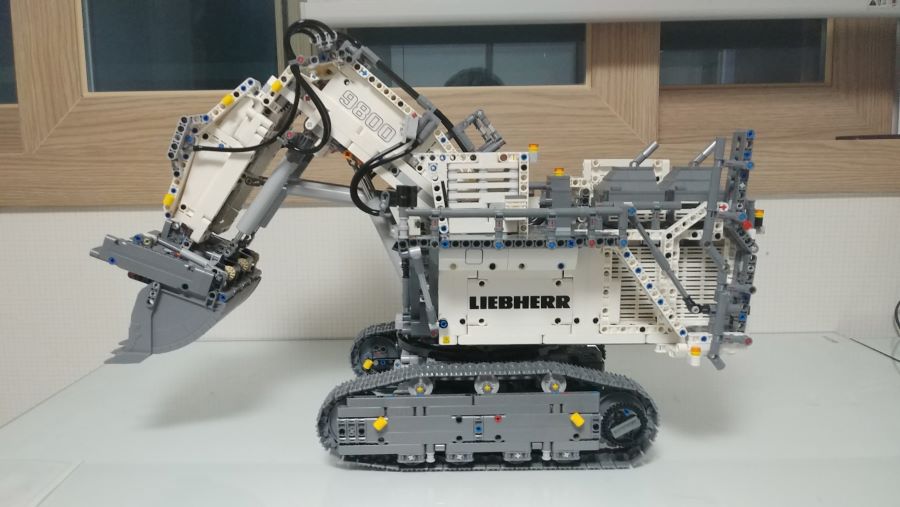
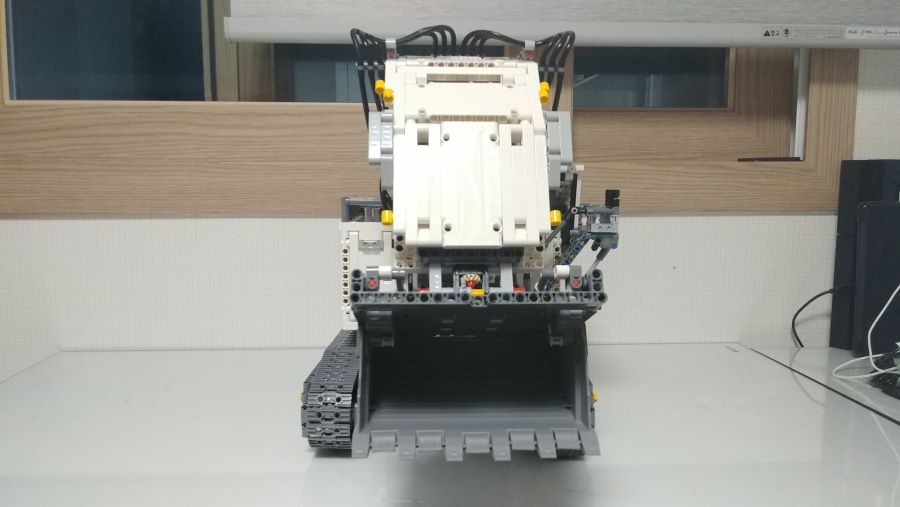
사진이라 크기가 감이 안잡히시겠지만, 엄청나게 큽니다.
이번엔 조립과정까지 담느라 다른 사진은 못올렸지만, 후에 다른제품들과 함께 찍은 스케일비교 사진도 올리도록 하겠습니다.
옆으로 넓은 붐대와 암.
버킷 크기도 엄청납니다.
휠로더의 버킷보다는 작지만..... 휠로더의 버킷을 팔로 휙휙 하는 느낌 이랄까요?


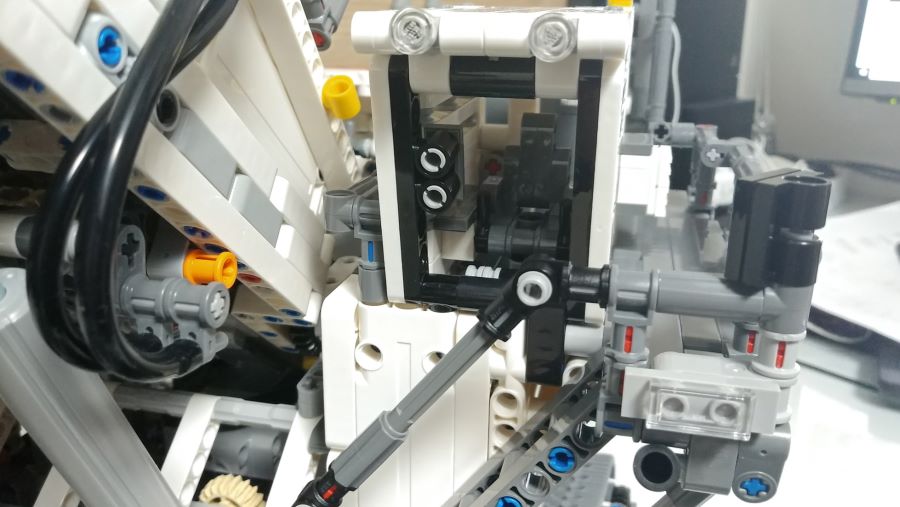
버킷 오픈 구동부 입니다.
작은 리니어엑츄에이터 2개가 사용됩니다.
구동시켜보니 다른곳은 모두 부드럽게 구동되지만, 버킷 오픈부분은 진동과 소음이 있습니다.
원인을 찾아보다가 싹 분해해야할것 같아서 집어치웠습니다.
조금 손대본 결과 연회색 베벨기어와 유니버설조인트의 문제가 아닐까 싶었습니다.
버킷 구동을 위한 엑츄에이터와 구동부.
엑추에이터가 암이 아닌 붐대에 장착되어 암과 평행을 이룹니다.

암과 붐대를 움직이기 위한 엑츄에이터와 구동부 입니다.

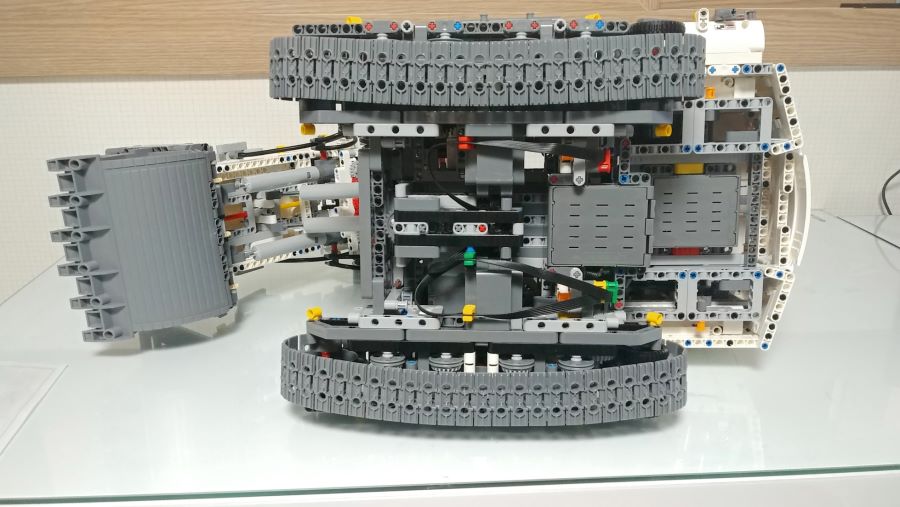
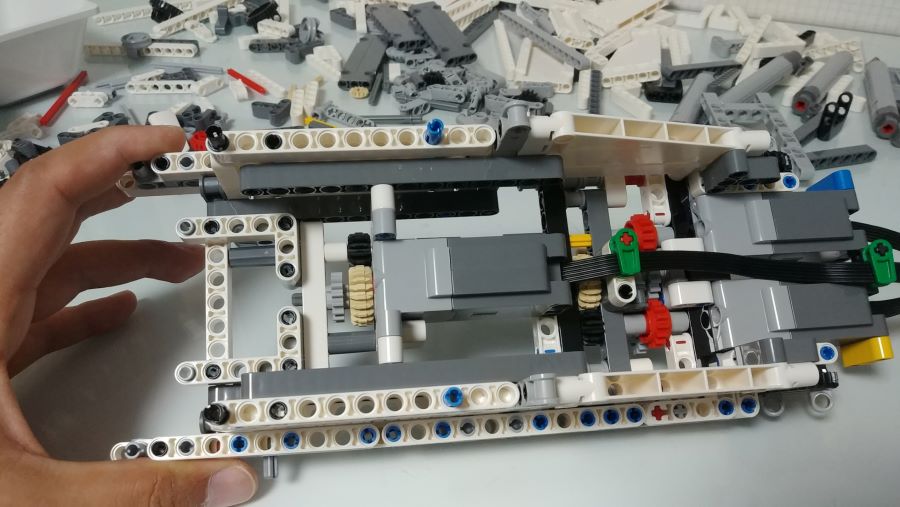
하부입니다.
모터의 선이 노출되지만, 선정리용 클립 덕분에 늘어지지는 않습니다.
하부구조는 단순해 보입니다만, 덩치가 하도 크니 중요한 구동부가 요소요소에 흩어져있어서 상대적으로 단순해 보이는겁니다.
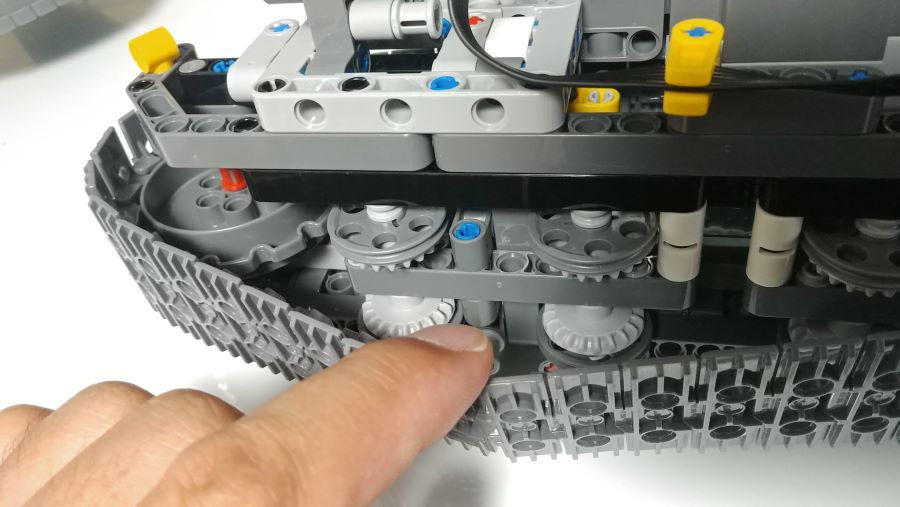
캐터필러 가이드롤러는 2중이어서 하중을 잘 지탱해주고 아주 부드럽게 구동되도록 해 줍니다.
거대한 덩치만큼 무게도 상당하기에, 붐과 암의 회전축에는 소형 턴테이블이 들어갑니다.
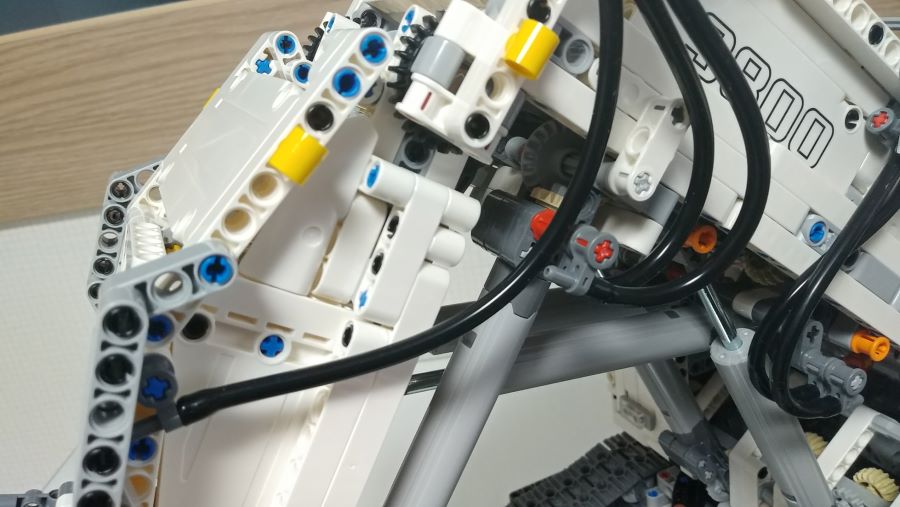
실리콘 호스는 단순 익스테리어 입니다.
저는 42100 소식이 떴을때 실리콘 호스를 보고 공압인줄 알고 실망했었다는....
운전석 입니다.
작지만 이쪽도 디테일이 좋습니다.

사람이 이동해야 하는 부분은 죄다 난간이 설치되어 있습니다.

실 차량은 건물 3층높이 이기 때문에, 운전석에 올라가려면 저렇게 계단을 내려야 합니다.
저처럼 고소공포증이 있는 사람은 운전도 못할것 같네요.

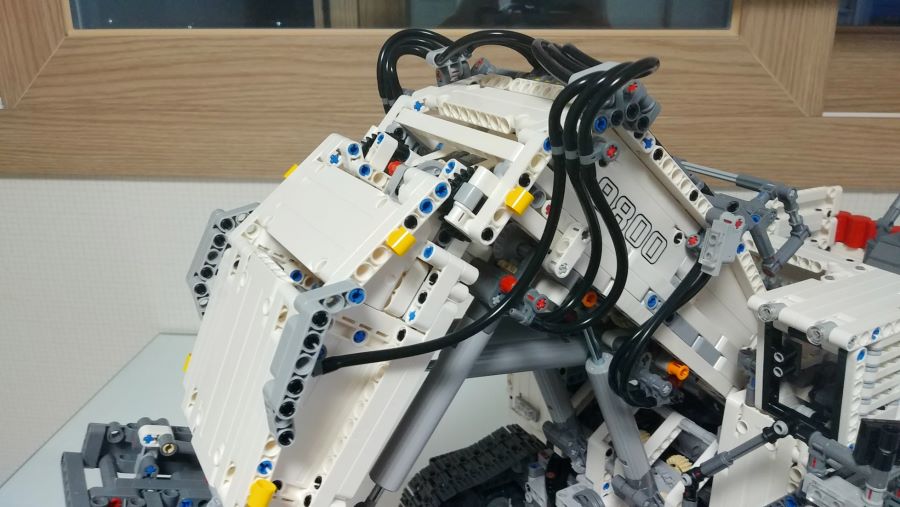
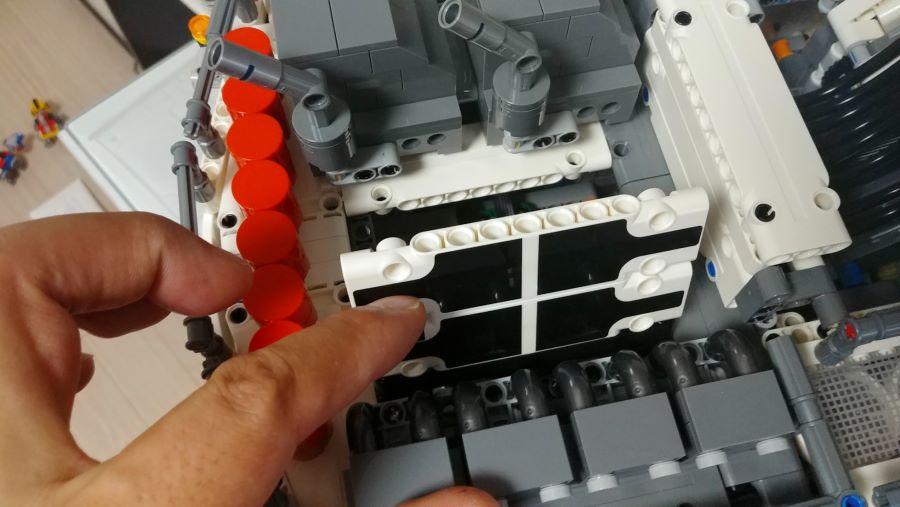
상부 디테일입니다.
저 빨간것은 연료통일까요? 실차량에도 주루룩 놓여있던데, 그대로 표현되어있습니다.
제품 스케일이 크니 디테일이 장난이 아닙니다.
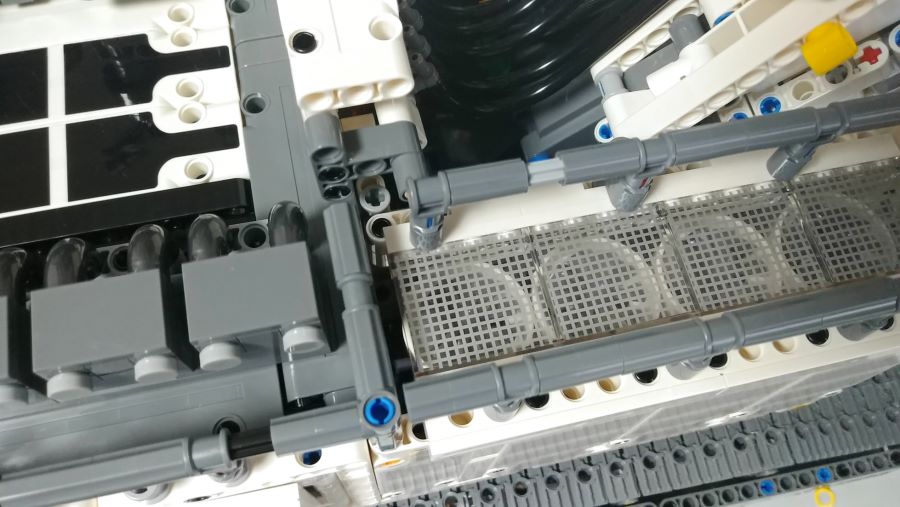
만들면서 웃음지었던 방열팬부분 입니다.
투명창 부품에 스티커를 붙여서 그릴을 표현하다니!!! 대형모델이기에 가능한 방법인듯 합니다.
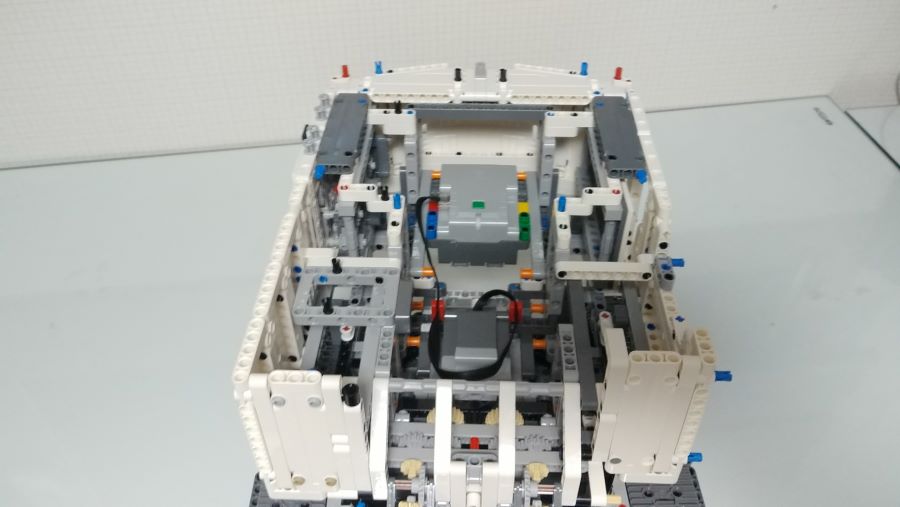
상부의 뚜껑은 오픈이 됩니다.

그러면 안쪽에 스마트허브가 보이고, 여기서 전원을 켜게 됩니다.
하단구동부는 본체 아래쪽에서 전원버튼을 눌러줘야 합니다.
참고로 하단 구동부와 본체는 전기적으로 완전히 분리되어있습니다.

실리콘 호스 익스테리어.
호스 양이 엄청납니다.

왜찍었는지 까먹은 사진.....

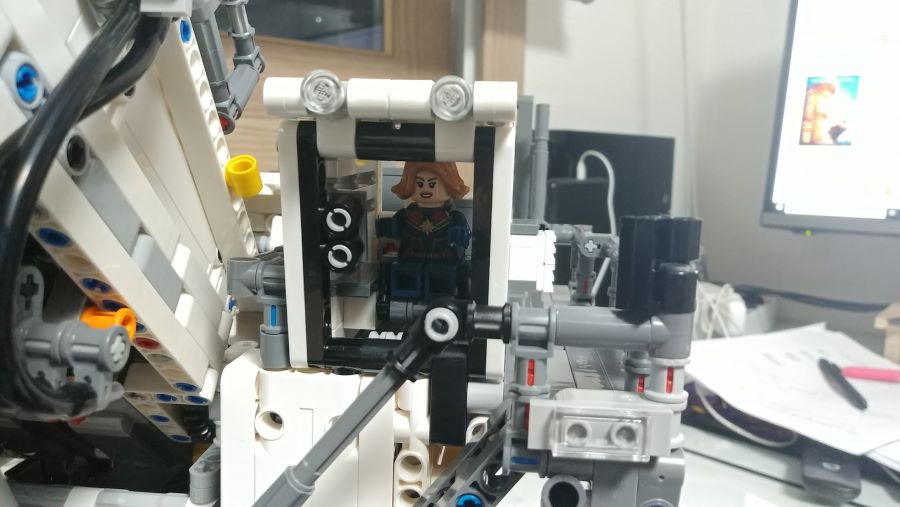
캡틴마블 찬조출연.

사진이 흔들렸네요 죄송합니다 ㅠㅠ
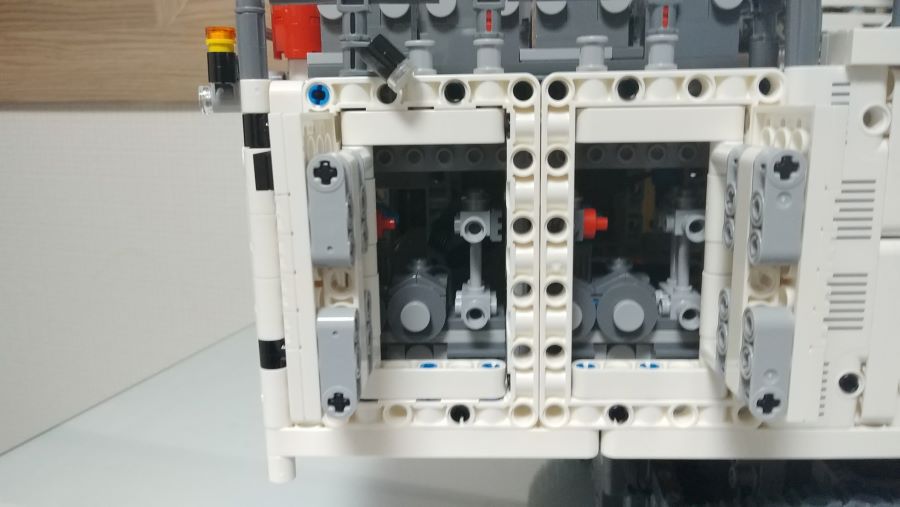
본체의 우측 측면은 개방이 됩니다.
개방하면 안쪽의 엔진 디테일이 보입니다.
조립과정 및 완성샷은 여기까지...
다음은 구동리뷰입니다.
앱은 전부 리뷰하기 너무 방대하기도 하고, 구입하신분들은 쉽게 접근할수 있으니 간단하게 주요 특징만 리뷰하겠습니다.
구입 계획이 없으신 분들이나 테크닉이 주종이 아닌 분들도 혹 하실겁니다.
9월27일 선출시 당시까지 앱이 업데이트 되어있지 않다가 9월30일날 업데이트 되었습니다.
콘트롤+앱이 아니더라도 부위즈 앱으로 페어링 및 조작이 가능하기 때문에, 구동테스트는 부위즈 앱으로 했었습니다.
앱을 실행하면

이렇게 42099와 42100 중 하나를 선택하는 화면이 나옵니다.
42100을 선택하면, 위의 조립과정중에 설명드렸던, 빌드테스트 과정이 나오고
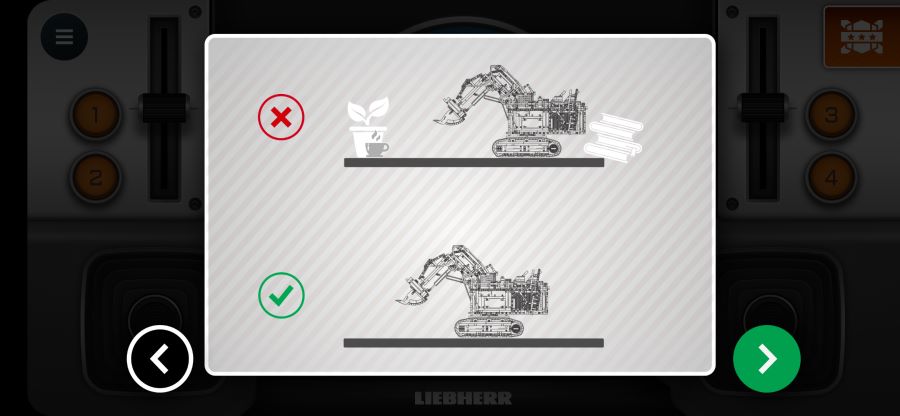
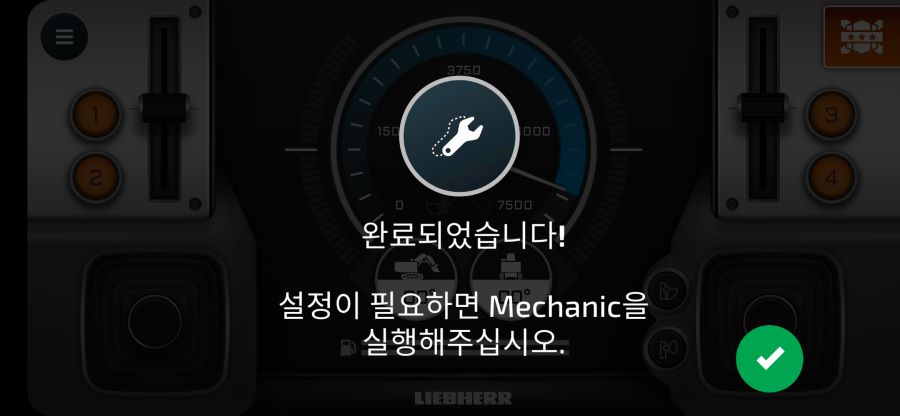
그 후 캘리브레이션 화면이 나옵니다.
서보처럼 센터잡을일도 없을텐데 왠 캘리브레이션? 이라고 생각했지만....
스스로 자동으로 이리저리 암을 움직이고 한계점을 찾습니다.
여기서 무릎을 탁 친게...
캘리브레이션 과정중 엑츄에이터가 헛도는 지점을 알아서 찾더니...
캘리브레이션 완료 후 수동조작 시 한계점까지 조작하면 거기어 알아서 모터가 딱 멈춥니다.
정말 신기합니다.
캘리브레이션이 완료되면 조작 튜토리얼이 나옵니다.
이 과정은 굳이 설명드리지 않아도....

수동조작용 인터페이스 입니다.
양쪽 상단의 레버는 궤도 구동을 담당합니다.
레버옆의 1,2,3,4 는 녹화나 코딩한 동작의 단축키 입니다.
좌측 조이스틱은 본체 좌우 회전과 버킷 을 움직입니다.
우측조이스틱은 붐과 암을 조종합니다.
좌우가 암 조종인데 좀 헷갈립니다.
수동조작은 아무래도 자유롭게 조작하려면 연습이 좀 필요합니다.
이 화면을 위로 쓸어올리면, 화면이 바뀌는데, 역시 수동조작하면이면서 가운데 게이지가 본체의 회전각도로 바뀌고 나머지는 동일합니다.
영상으로 보시겠습니다.
조작 화면을 보이게 하느라 정작 본체의 작동상황을 너무 가려버렸네요.
조이스틱 상하 좌우로 다른부분을 조작하기에 조작에 미스가 좀 많이 생깁니다.
생각대로 조종하기가 좀 어렵네요.
여기서 특이한점은 본체의 회전과 좌우 회전구동의 속도가 같습니다.
제자리 회전 구동시키면서 회전방향과 반대로 본체를 회전시키면 마치 본체가 정지한것처럼 하단 구동부만 회전합니다.
의도적으로 속도를 맞춘것같은데 은근 재미있습니다.
수동조작 화면을 옆으로 쓸면 드래그 조작화면이로 바뀝니다.

옆에 113도 라고 표시된 부분은 본체의 회전각을 조작하는 부분이며, 가운데 암 그림의 주황색 부분을 터치해서 끌면 암의 포즈가 바뀝니다.
IK (Inverse Kinematic : 역 운동학. 다관절의 끝단을 움직임으로 전체 관절의 움직임을 제어하는것) 에 의해 버킷부분을 움직이면 암과 붐이 알아서 자리를 잡습니다.
수동조작에 이어 드래그 조작을 하는 영상입니다.
암 조작이 굉장히 편리합니다.
여기서 스마트허브의 장점이 빛을 발합니다.
눈여겨 보아야 할 것은 터치 드래그로 암의 자세를 잡아주면, 검은 실루엣이 천천히 따라 움직입니다.
이 검은 실루엣이 실제 42100의 암의 움직임입니다.
자세를 잡아주면 자세가 그림과 동일해 질때까지 암이 작동합니다.
요즘 기술로 따지면 별거아닌건데, 레고로 구현되니 참 신기합니다.
마지막으로 코딩과 액션기록입니다.

코딩은 각 부위별로 움직일 방향과 각도가 정해진 조각을 타임라인에 올려놓는 방식으로 진행합니다.
정확히는 코딩이라기 보다는 매크로에 가깝죠.
특정 동작을 정의하고 해당 순서대로 움직이게 하는것이죠.
여러가지를 만들어서 각각 저장할수있고, 위의 수동조작에 언급한 1~4의 단축키에 등록할수 있습니다.
암을 내려 땅을 긁는 동작과 암을들어 본체를 회전하고 버킷을 여는 일련의 동작을 정의해 두고 단축키로 지정하면 복잡한 동작을 쉽게 할수있겠죠.
저장과 단축키 지정은 크게 어려운일이 아니니 액션기록과 함께 영상으로 보여드리도록 하겠습니다.
조작에 사용한 폰이 구형에 화면이 깨진폰이다 보니 터치가 잘 먹지않은점은 양해부탁드립니다.
액션기록 버튼을 터치하면 수동조작 인터페이스가 뜹니다.
이때 좌측위를 보면 네모 버튼이 있지요.
수동조작으로 원하는동작을 동작시킨 후 네모버튼(녹화끝) 을 누르면 저장화면으로 넘어갑니다.
저장할때 아이콘은 여러가지 중 고를수 있습니다.
저장하고 나서 단축키를 지정하면 바로 수동조작에서 사용할수 있습니다.
저는 액션기록 기능이 있다는걸 전혀 모르고있다가 액션기록 버튼을 눌러보고는 정말 깜짝 놀랐습니다.
화면 터치 드래그로 조작하는것도 이마를 탁 칠 정도인데, (코딩은 이미 알려져있었고) 일련의 조작을 한 다음 그 조작을 그대로 저장해서 단축키로 한번에 사용할수 있다는점에서 정말 깜짝 놀랐습니다.
이번 42100은 여러가지로 놀랍습니다.
멋진 해외창작 작품들에 흔히 이런덧글이 달리죠.
'레고사는 왜 이런걸 못만드는걸까요?'
레고사가 정말 못만드는걸까요?
제품을 디자인할때 구매연령층, 조립난이도, 제품가격 등을 고려해서 디자인을 하니, 그런부분들을 고려 안하고 만드는 해외 창작 작품들에 비해 뭔가 좀 아쉬울 수 밖에 없다고 생각합니다.
그런데, 이번 42100은 그 의문에 대한 답이 아닐까 싶습니다.
레고사가 작정하고 만들면 이런 괴물이 나온다.... 라구요.
일단 외관 동작구조 등은 정말 해외창작작품이라도 믿을수 있을 만큼 디테일하게 잘 만들어져 있습니다.
레고 기성품 특유의 큰 패널들을 최소한으로 사용하여 러프하게 형태를 잡는 방식이 아니고, 세세한 디테일까지 전부 살렸습니다. 특히 외관에서요.
거기에 거대한 몸집과 몸무게를 고려한 구동부 설계도 빛이납니다.
거기에 이런 완벽한 구동구조를 자유자재로 제어할수있게 해주는 다양한 조작방식이 화룡정점을 찍습니다.
사실 해외창작 작품이던 기성품이던 굴삭기는 조작이 좀 어렵습니다.
그래서 이번 42100이 굴삭기로 선정된게 아닐까 싶습니다.
스마트허브로 이런걸 할수있다. 이런복잡한 움직임도 제어할수있다 라는걸 여실히 보여준 작품입니다.
제 입장에서는 콘트롤+에서 기대했던걸 전부 보여줬다고 해도 과언이 아니라고 생각합니다.
여기에 각종 센서를 사용하고, 모터제어와 조종인터페이스를 직접 만들수있는 환경이 된다면 더할나위 없이 완벽할것 같습니다.
기차와 배트모빌, 레고 부스트를 보면 콘트롤+의 유저 커스텀쪽의 진화는 당연하다고 생각합니다.
앞으로 어떤걸 보여줄지 더더욱 기대가 되게 만드는 42100이었습니다.
세트가격이 비싸다보니 이런 모터가 잔뜩 들어간 완벽한제품이 앞으로 또 출시가 될지는 모르겠습니다.
하지만... 이건 비싼게 아니라고 생각합니다.
자금되시는 분들 꼭 사시라는 말씀을 끝으로 리뷰를 마칩니다.
감사합니다.
으익 엑박입니다
지적 감사합니다. 이제 나오나요?
네 이제보입니다 그나저나...어제오늘 42100이 두대나 올라오다니 ㅠ
어랏 이거 서온대디님 리뷰랑 똑같은데
제가..서온대디입니다...