설정의 실험적 섹션에 있는 토글을 통해 헤드셋의 빠른 설정에 여행 모드를 추가할 수 있습니다. Meta는 이를 보려면 안정적인(PTC가 아닌) 시스템 소프트웨어 v65를 사용해야 하며 , 여전히 그렇지 않은 경우 헤드셋을 다시 시작해야 한다고 말합니다. Quest Pro는 지원되지 않으며 Quest 2와 Quest 3만 지원됩니다.
여행 모드를 활성화하면 움직이는 비행기에서 위치 추적이 작동합니다. Meta에 따르면 기차와 같은 다른 형태의 교통수단은 아직 공식적으로 지원되지 않지만 향후 어느 시점에는 지원될 것이라고 합니다.
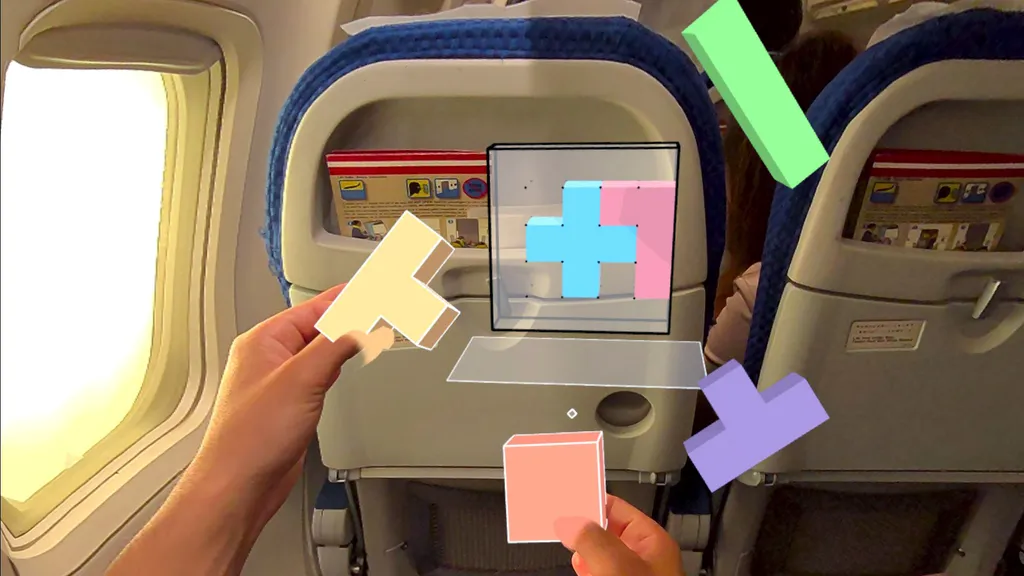
이전에는 비행 중에 Quest 헤드셋을 사용하려고 하면 항공기가 고도, 속도 또는 방위를 변경할 때 모든 가상 물체와 인터페이스가 반대 방향으로 날아가고 난기류가 있을 때 모든 것이 격렬하게 흔들렸습니다. 비행에서 Quest를 사용하는 유일한 실용적인 방법은 위치 추적을 비활성화하는 것이었고 통과도 비활성화하여 Oculus Go 스타일 회전 전용 3DoF VR로 돌아갔습니다.
그런데 애초에 여행 모드가 왜 필요한가요?
사람들은 헤드셋, 안경, 자체 추적 컨트롤러의 마커 없는 내부 추적 시스템이 카메라만 사용한다고 생각하는 경우가 많지만 사실은 그렇지 않습니다. 이러한 시스템은 작은 가속도계와 자이로스코프가 포함된 칩인 관성 측정 장치(IMU)에 크게 의존합니다.
카메라는 일반적으로 30Hz 또는 60Hz에서 실행되는 반면 IMU는 일반적으로 약 1000Hz의 업데이트를 제공하여 대기 시간을 훨씬 단축합니다. 그러나 IMU는 실제로 절대적인 움직임을 감지할 수 없습니다. 적어도 직접적으로는 감지할 수 없습니다. IMU의 가속도계는 중력에 대한 가속도를 감지하며 시간에 따른 가속도를 적분하여 속도를 얻을 수 있습니다. 그리고 시간이 지남에 따라 해당 속도 값을 다시 적분하면 원래 위치에서 변위가 발생합니다.
이 과정을 추측 항법이라고 합니다. 순간적으로 모든 헤드셋과 컨트롤러가 스스로를 추적하는 방식이며, 카메라나 레이저 기지국과 같은 광학적 측면은 기본적으로 IMU 데이터의 잡음으로 인해 발생하는 누적 오류를 수정하는 데만 사용됩니다. 그러나 비행기와 같이 움직이는 차량에서는 가속도계가 차량 자체의 가속도를 포착하여 헤드셋 자체가 움직이는 것으로 간주하여 갑작스럽고 빠른 위치 표류가 발생합니다.
Apple Vision Pro는 출시 이후 여행 모드를 갖추고 있었으며, 리뷰에서 이를 높이 평가했습니다 . 하지만 창밖을 내다보면 작동이 중단된다는 점을 언급했습니다. 흥미롭게도 Meta는 창밖을 내다볼 때에도 여행 모드가 작동한다고 주장합니다. 이번 달 말에 여행 모드가 포함된 비행기에서 Quest 3를 테스트할 계획입니다.