건담 시스템 해킹(1/48 Gundam RX-78F00 Bust Model)
죄송합니다. 해당 콘텐츠는 구글 번역기를 통해 생성되었습니다.
항공우주공학과 연구원으로 위장한 그가 기계공학과에 이미 침투한 스파이와 만나던 바로 그 순간, 그의 진짜 정체가 드러났다…
골든 패스—이것만 있으면 연방군의 모든 모빌슈트 시스템에 해킹할 수 있었다.
English Version







모델 제작
전체 시스템은 다음과 같은 기능을 포함하며, 각 기능은 독립적으로 작동하여 스토리 스크립트를 구성합니다.
- 머리 앞뒤 조명 효과
- 16개의 독립적인 풀컬러 LED 눈 (각 눈 독립 작동 가능)
- 벌컨포 발사음 및 조명 효과
- 목 부분의 사실적인 로봇 움직임 시뮬레이션
- 3개의 독립적인 어깨 조명 효과
- 왼쪽 레이저 검 작동음 및 조명 효과, 발사 및 수축 효과
- 조종석 LCD 효과
- 조종석 내부 및 외부 3가지 조명 효과
- 배낭 로켓 추진기 발사음 및 조명 효과
- 침입자 및 스파이 머리 조명 효과
- 로봇 팔 개폐 동작
- 시연 시작을 위한 거리 감지
- 언어 설정을 위한 제스처 감지
- 시작 및 종료 스케줄링을 위한 내부 시계 계산 시스템
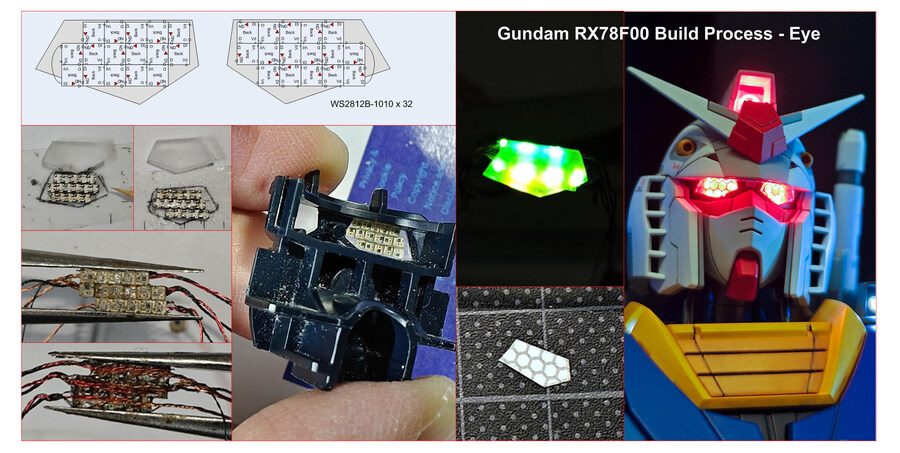
눈
- 투명 부품은 1.7mm 플라스틱 시트로 재구성
- WS2812B-1010 LED 32개(양쪽에 16개씩) 삽입
- 외곽 테두리에 벌집 모양 데칼 추가
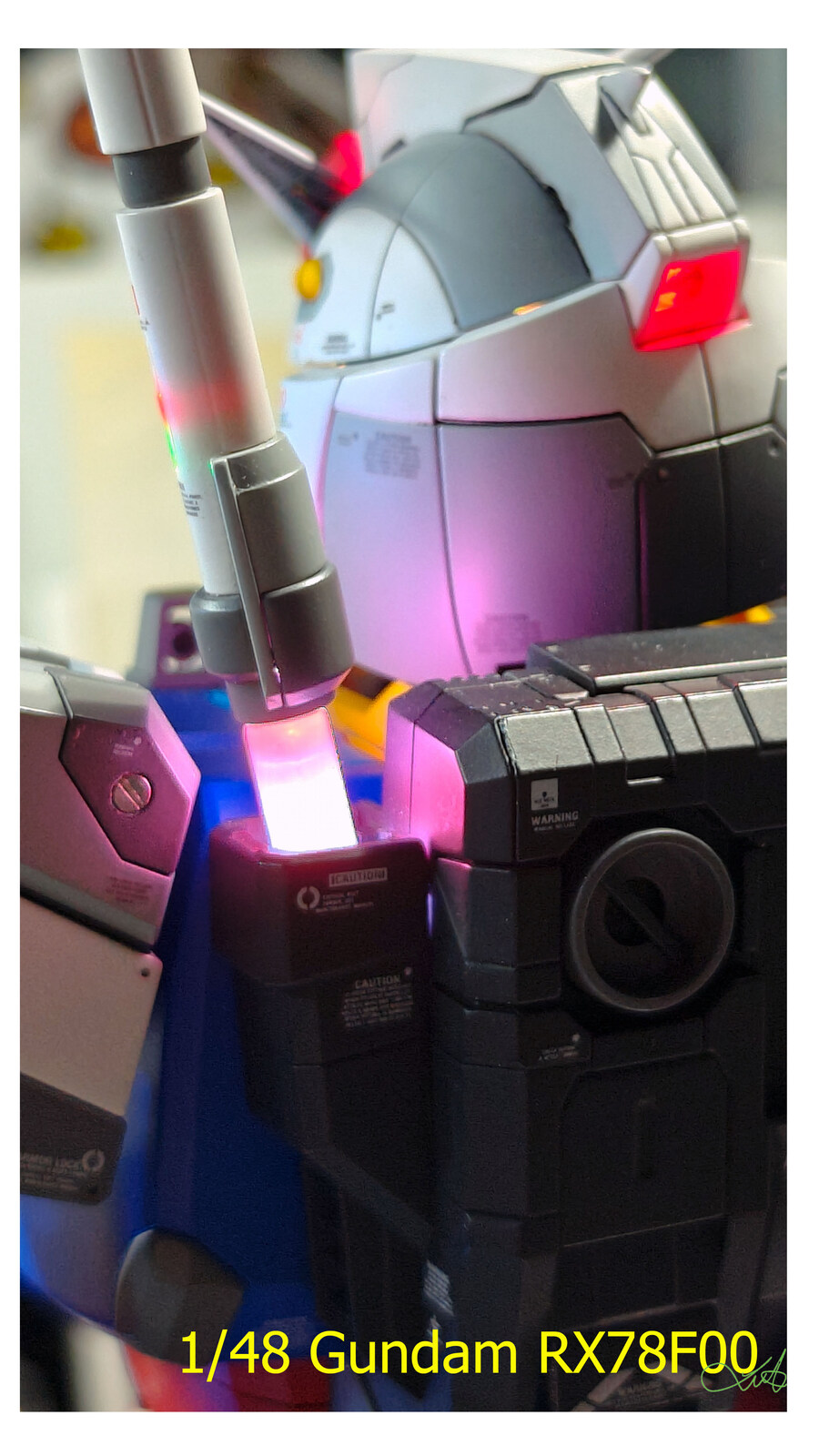
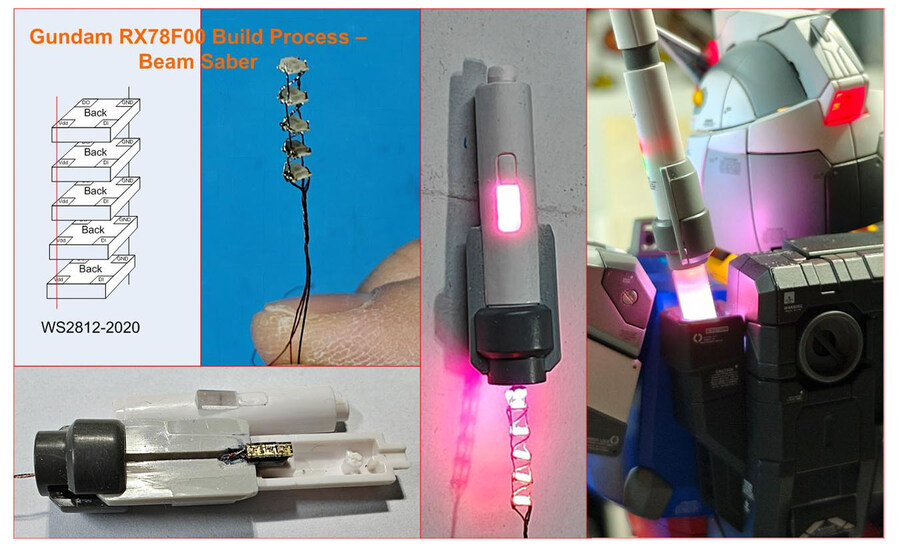
광선검
- 칼날은 WS2812B-2020 LED 5개로 제작, 손잡이 표시등은 WS2812B-1010 LED 3개 사용
- 표시 및 작동은 1.5g 리니어 서보로 제어
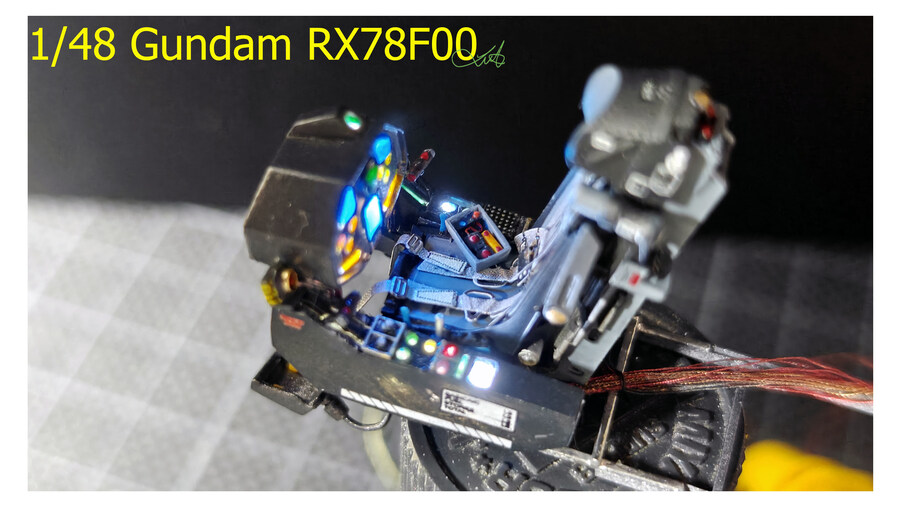
조종석
- 조종석 패널과 측면은 플라스틱 시트와 LED로 제작
- 조종석 시트는 사출 좌석 키트로 제작

조종석 내부
- 서버 랙과 배선은 플라스틱 시트와 LED로 제작
- CD 헤드 조명 효과를 추가하면 수익성이 좋을 것이라는 소문이 있음
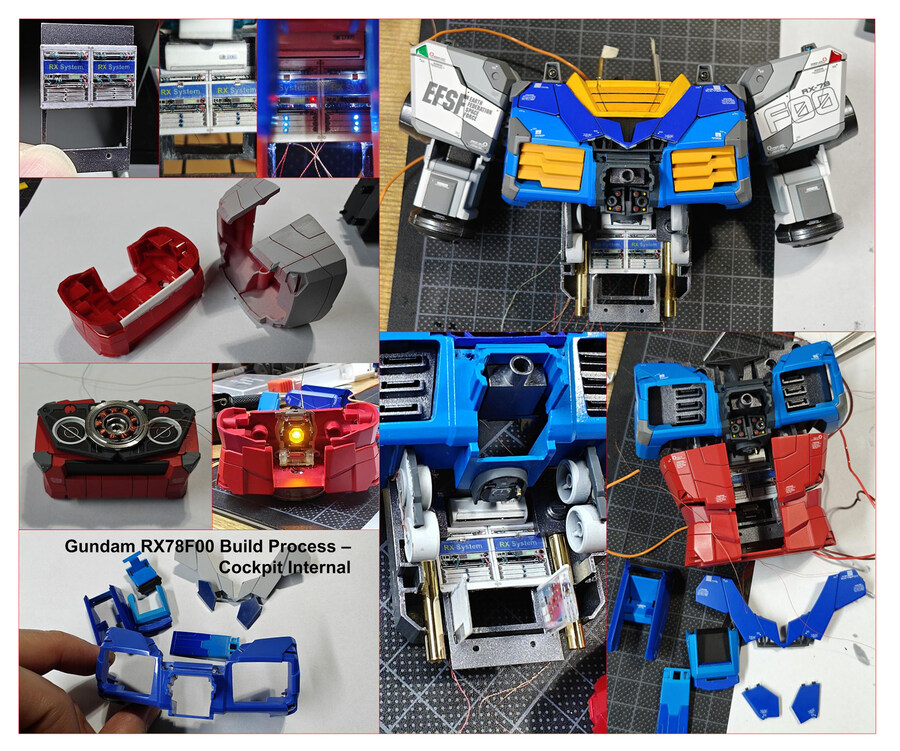
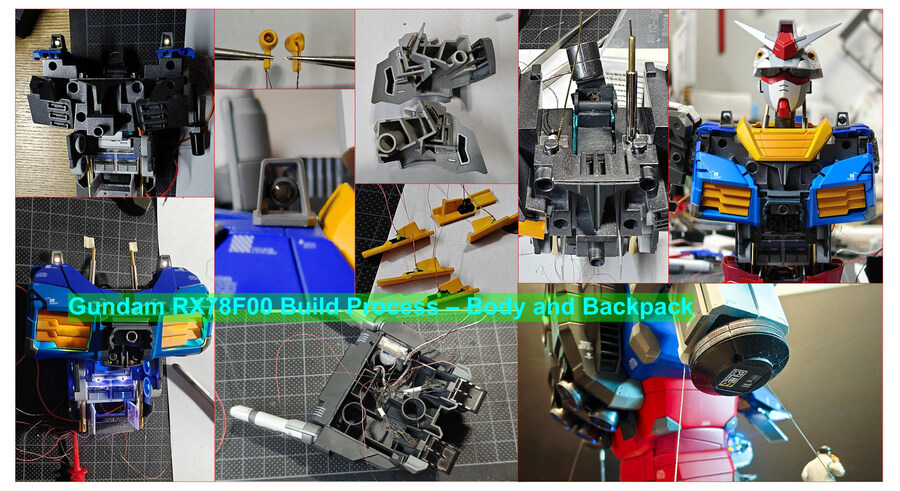
몸통 및 배낭
- 몸통에 다수의 LED 추가
-목은 9g 서보 2개로 제어, 광선검 개폐 제어 1.5g 리니어 서보 모터 사용
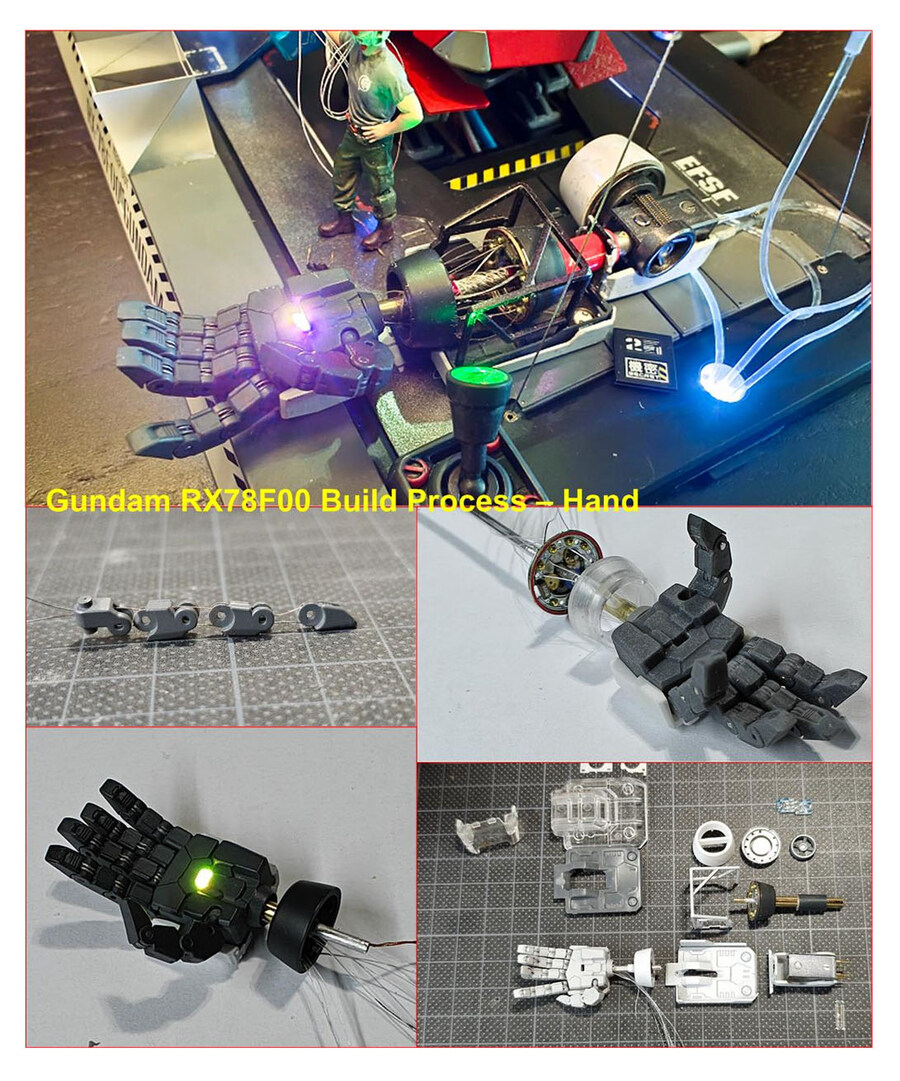
손
- 전방 작동 와이어 오토마톤. 오토마타 원리를 기반으로 설계했지만 그다지 성공적이지 못했습니다. 손에도 같은 방식을 적용했지만 효과를 향상시키기 위해 추가적인 개선이 필요합니다.
- 광선검과의 상호 작용을 위해 손바닥에 WS2812B-1010 LED 두 개를 추가했습니다.
- 나머지 팔 부품은 키트, 일부는 커스텀 제작, 일부는 PG 제품을 사용했습니다.
베이스
- 필요한 제어 장치의 위치를 보여줍니다.

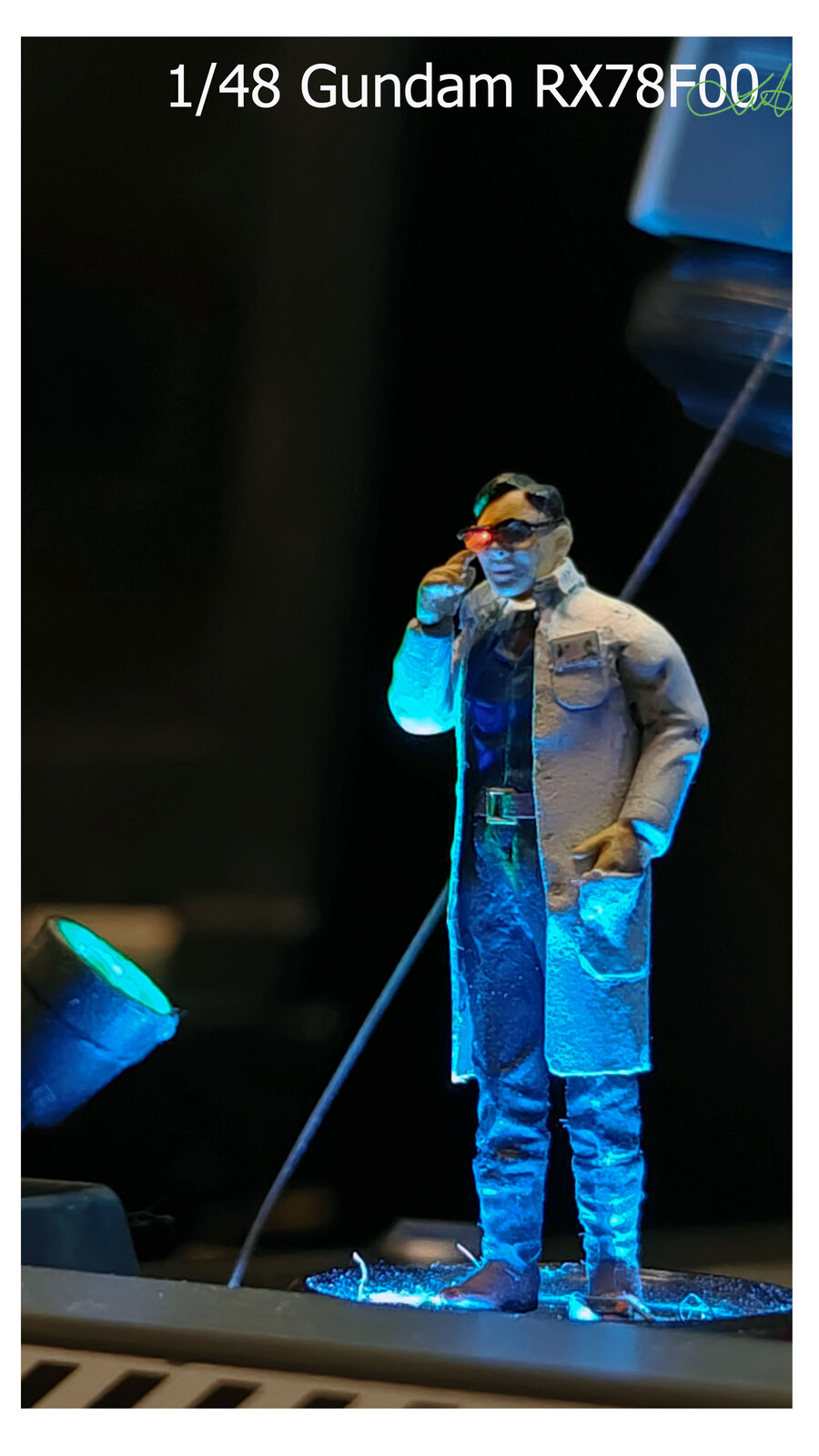
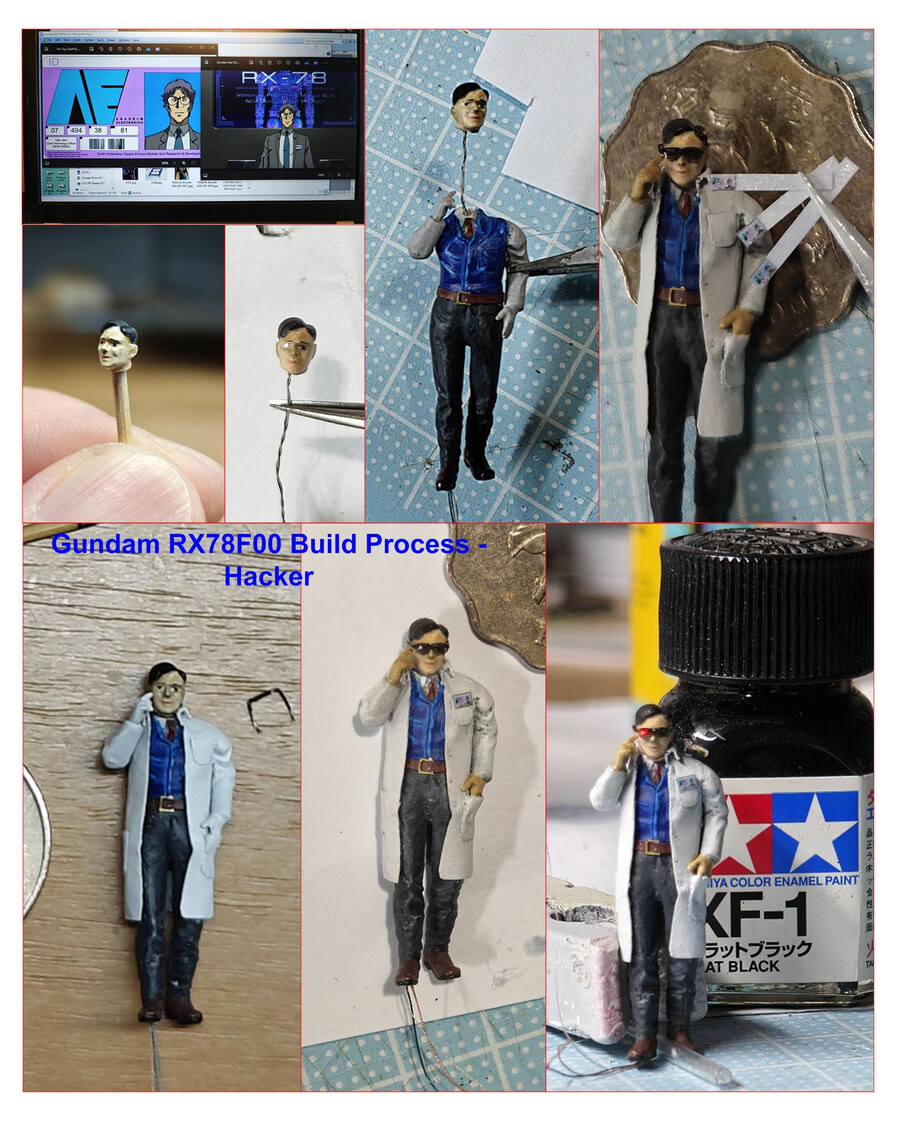
침입자/스파이
- 침입자는 1/48 스케일 모델과 키트를 개조했습니다. 침입자의 머리에는 LED를 추가했고, 안경은 구리선으로 제작했습니다. 실험복은 종이로 만들었습니다.
- 스파이는 1/48 스케일 휴머노이드 키트를 개조했습니다. 머리는 건담 아티팩트 4 건담 MKII의 것을 사용했으며, LED를 위한 구멍을 추가로 뚫었습니다.

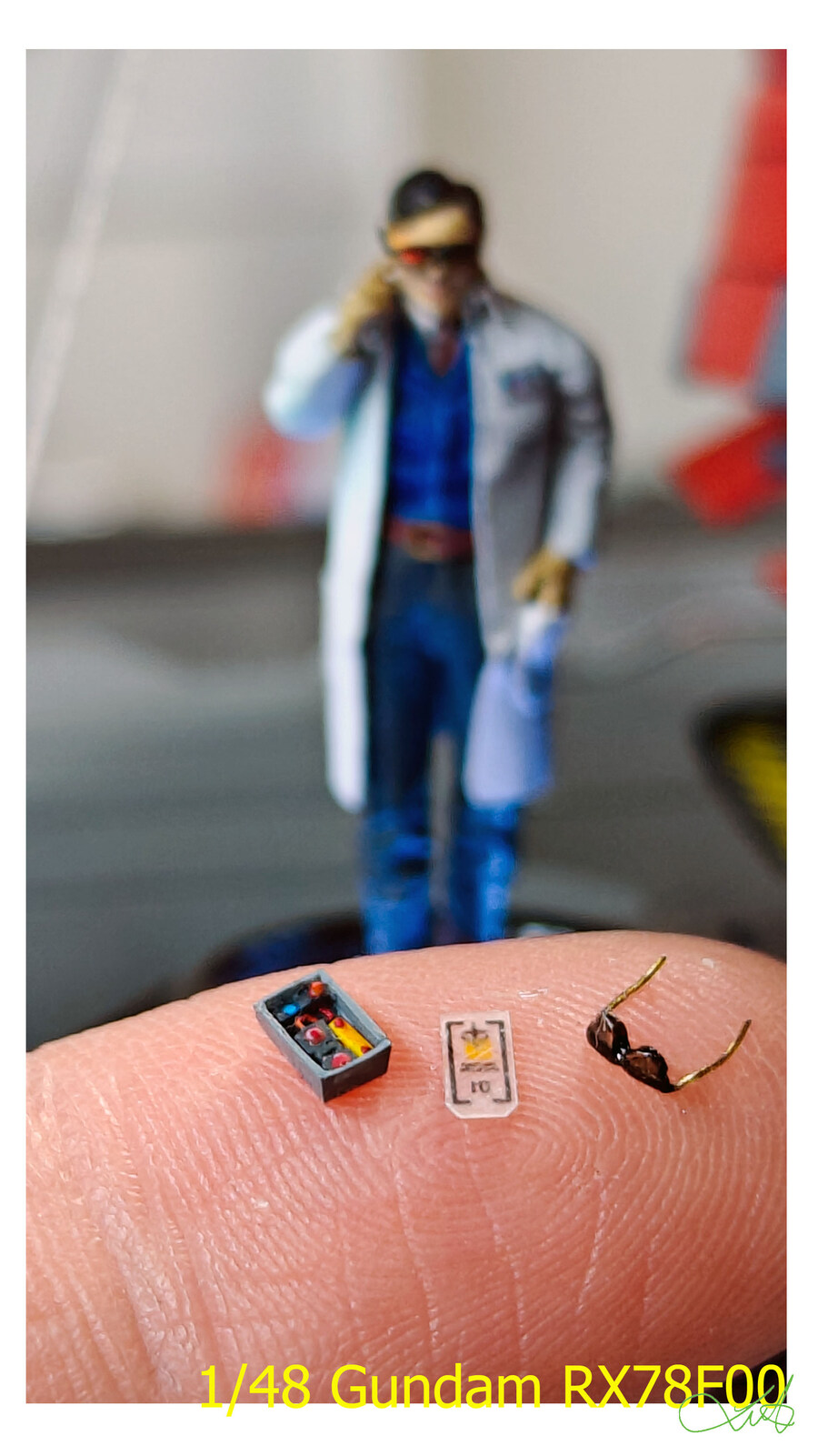
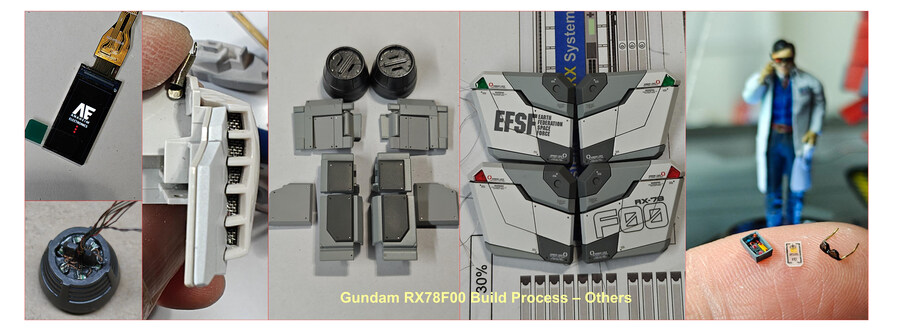
기타
- LCD 이미지, 제트 노즐 LED, 리벳, 정체불명의 템 레이 회로, 안경, 그리고 골든 패스.
회로도
- 전체 회로 설계

센서, 시계
- 거리 감지: 설정된 거리 400mm 이내로 물체가 접근하면 이를 감지하여 운동을 시작합니다.
- 제스처 감지: 사용자의 손동작을 감지하여 현재 운동 언어를 설정합니다.
- 시계: 운동 시간을 08:00~23:00으로 설정합니다.

소프트웨어
- 마스터/슬레이브 아키텍처는 이전 I2C 설계 방식을 따릅니다. 마스터는 ESP32를 사용하고, 슬레이브는 6개의 ATTiny85와 VL53L0X(근접 감지), PAJ7620(제스처 감지)으로 구성됩니다. LCD는 Seeed XIAO RP2040으로 독립적으로 제어됩니다. 기본적으로 각 기능은 독립적으로 작동할 수 있으며, 전체적인 화면 표시는 여러 이벤트를 조합하는 스크립트 기반 방식을 사용합니다.

Thank you for watching